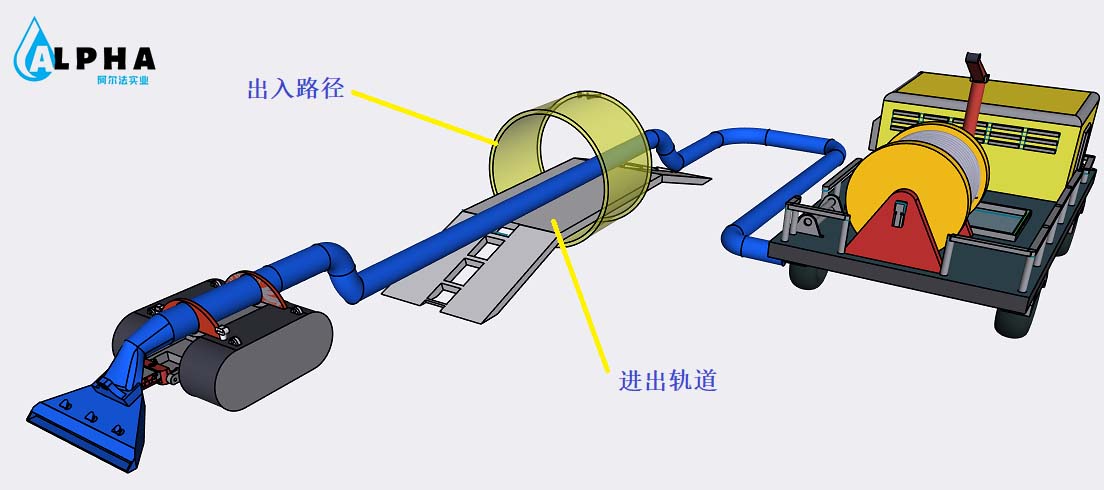
6dgswq阿尔法水(液)下清淤除渣机器人。是我公司针对不同行业、不同罐体、池体、管涵,不同介质的沉积淤积沉渣,设计的专门用于水下清淤机器人系列成套设备,依据使用场景满足防爆隔爆防水要求。其作业原理是,清淤机器人搭载所需要的工作端头,操作员操作机器人行走在作业范围,控制作业端工作姿态和工作效率,机器人在行进过程由作业端对所处位置的淤泥沉渣进行搅散、搅匀、切割、揽收、破碎等处理,再由提取装置进行提取和输送,最终把淤泥沉渣输送至后处理设备进行分类、分离、粉碎、过滤以及资源回收利用等。
该新型设备成套设备由水下作业端、工作站(动力机柜、控制机柜、)后处理端、管线组成。动力机组为整个新系统提供所需的动力支持,由发电机、液压站组成;控制机柜监测和控制整体系统的运行(可实现遥控或者5G远程智能检测和控制);工作前端由履带车底盘搭载工作部件。根据介质的不同选择不同的提取方式和辅助工具,提取方式分为:自吸、气提、泵送、推送、铰龙等多种模式,辅助工具分为搅吸头、绞龙旋耕、绞龙破碎搅吸头、张合划拨臂、铲斗叉斗、滚筒式毛刷、高压水喷头等,以及照明视讯设备。工作后端主要是预处理前端提取出来的介质,实现干湿分离。
阿尔法箱涵清淤机器人在作业特性、检测方式、造型设计等方面进行了迭代升级,选用自主研发的智能系统软件,操纵更趋个性化,清淤疏通水平获得进一步提升。
清淤机器人本身可以实现全水中作业,根据声呐成像系统、脏水高清照相机等检测装置明确水里污泥情况,并把信息内容即时传送到路面。作业人员根据主操控台获得水中信息内容,系统软件具备高度的自动化技术和自自学能力,可以根据作业环境的更改,全自动调节作业姿势。
当机器人实行自动化技术作业时,收放线器可以根据机器人的行走距离调节收施工放线,大大简化了手动操作。路面泥水分离站可以实现高效率的泥水分离,其由震动漩流分离出来、萃取等工艺处理作业,.终获得含水量.少80%的液体物。清淤机器人能够灵活的在水下作业,有视觉效果声呐能够在水下显像,像蛟龙图片的眼睛一样。它还拥有钢材的身躯,像飞龙一样在水下猖狂,是清淤作业的一把好手。

清淤机器人配置视觉效果显像声呐,有别于传统式声呐扫描成像,视觉效果声呐扫描仪可以直接形成水中图象,水中自然环境勘察无盲区,路面作业人员对水中自然环境的判断更精准。
机器人内部结构选用跳仓设计方案,有效区别不同类型的程序模块,完成优良排热的前提下,模块化提高了新产品的稳定和便捷性。
搅笼部件选用模块化,可以根据工作状况进行维修,总体操作可玩性获得持续提升,可融入不同类型的作业工作状况。尤其是对于污泥中的垃圾,升级的搅笼控制模块可以对它进行高效率的解决。