6dgswq 随着社会的快速发展,科技的进步,石化储存罐、工业沉淀池、市政管道箱涵被广泛运用于生活、工业中,时间久了储存罐、沉淀池、管涵的底部会沉淀大量的沉渣淤泥。定期不定期清淤除渣成为储罐和沉淀池必然的作业内容。
但是现有的清淤除渣主要以人工进入作业面,利用高压水枪,或者依靠工程挖掘机,用吸污车的方法进行清除,这种方法需要停机、排空表面积水(液),存在劳动量大、效率低下、安全性差的弊端。石油、化工储存罐、工业沉淀池、以及地下管涵大多数存在有危害人体健康的有毒有害物质,人工清淤除渣面临生命安全风险,所以需要一种无人进入的方式来完成这一工作。另一方面人工清理方法局限、工具单一,在清理的污染物(淤泥、沉渣)时还会产生跑冒滴漏、有害气体挥发泄露、粉尘扬尘等二次污染,从而导致对环境的破坏。

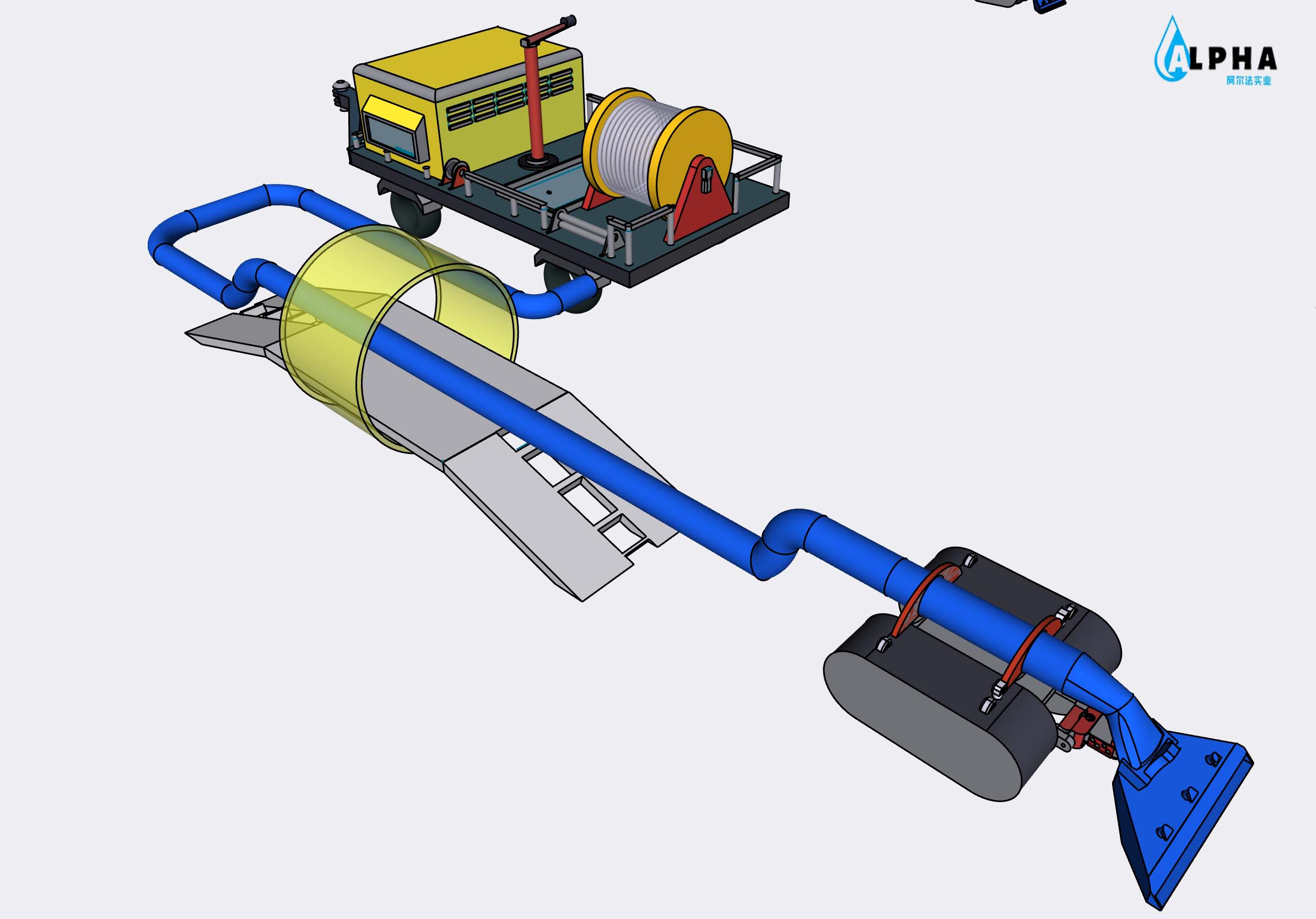
线控液压式水下工作机器人,驳岸配套后处理成套设备,水下清淤疏浚、从淤泥绞散、吸除、到过滤、分离一体化完成
组 成
1、转运/移动跟随平台(平台动作装置、配电柜、垃圾干湿分机组、吊机、水下工作端搁置空间、液压配套控制装置、水管、缆线收纳仓)
2、水下工作端(履带车、作业蛟龙、输送泵、工作端控制链接系统、遥控接收器、照明和影像系统)
适合范围
河道清淤疏浚、清障排险、池塘底泥清除、水下救援抢修、池底除渣掏泥、管道疏通。
特点优势
1、20米内水下工作
2、水下采用全液压系统控制,安全高效、联动敏捷
3、流量20立方-200立方可选,扬程10-20M、有效传送距离100M
4、垃圾粒径小于5CM
清淤机器人配置视觉效果显像声呐,有别于传统式声呐扫描成像,视觉效果声呐扫描仪可以直接形成水中图象,水中自然环境勘察无盲区,路面作业人员对水中自然环境的判断更精准。
机器人内部结构选用跳仓设计方案,有效区别不同类型的程序模块,完成优良排热的前提下,模块化提高了新产品的稳定和便捷性。
搅笼部件选用模块化,可以根据工作状况进行维修,总体操作可玩性获得持续提升,可融入不同类型的作业工作状况。尤其是对于污泥中的垃圾,升级的搅笼控制模块可以对它进行高效率的解决。